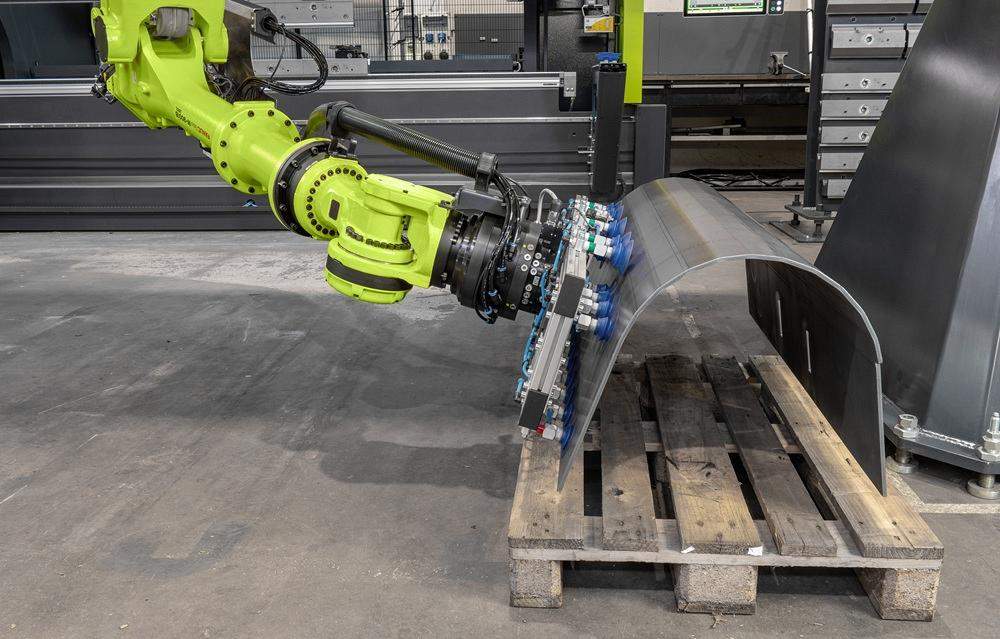
أخبار ar.wedoany.com، يمكن البدء في أتمتة الثني بالروبوتات من مرحلة إزالة القطع. يقدم مايك روديغر، مهندس التطبيقات المتقدمة للروبوتات في شركة SafanDarley North America (الواقعة في واوكيشا، ويسكونسن)، نصائح تدريجية للورش التي تفكر في اعتماد هذه التقنية. يتطلب تشغيل مكابس الثني مهارة معينة، ولا يقتصر الأمر على مجرد الالتقاط والوضع، لكن هذا العمل يتسم بالتكرار العالي، خاصة مع زيادة عدد القطع، كما أن العثور على مشغلين مهرة أمر صعب. لا ينبغي أن تشغل المهام المتكررة والمجهدة بدنيًا وقت العمال المهرة.
يُعد حجم الإنتاج عاملاً حاسماً في تحديد جدوى الأتمتة. يشير روديغر إلى أنه ليست كل القطع مناسبة للأتمتة، وأن فعاليتها تكون أفضل عندما يكون حجم الإنتاج مرتفعًا. لا يعني ارتفاع حجم الإنتاج بالضرورة دفعات إنتاج كبيرة، فالتقنيات الحديثة، من خلال الإعدادات المجزأة، والتغيير التلقائي للقوالب، والمحاكاة غير المتصلة بالإنترنت، تتيح استراتيجيات معقدة لتدفق القطع، مثل الإنتاج القائم على المجموعات. تنطبق الأتمتة أيضًا على عائلات القطع المتشابهة، مثل الأغلفة، حيث يمكن ضبط البرنامج للتعامل مع أشكال هندسية محددة يتم طلبها بشكل متكرر. أما بالنسبة للقطع النموذجية لمرة واحدة، فقد يكون مكبس الثني اليدوي أكثر ملاءمة.
يُعد حجم القطع اعتبارًا مهمًا آخر. يتفوق الثني بالروبوتات في التعامل مع القطع الصغيرة جدًا والكبيرة جدًا. تشكل قطع العمل الصغيرة خطر انحشار الأصابع في مكابس الثني القديمة التي تفتقر إلى أنظمة السلامة الحديثة، بينما تزيد القطع الكبيرة من الحاجة إلى العمالة وتثير مشكلات بيئية (بيئة العمل البشرية). يتعب المشغل عند رفع الألواح الكبيرة، مما يؤدي إلى عدم القدرة على دعم قطعة العمل بالكامل أثناء عملية الثني، مما يؤثر على تكرارية الثني.
يتطلب تحديد استراتيجية الأداة الطرفية (End Effector) النظر في مزيج المواد في الورشة، وخاصة نسبة المواد المغناطيسية. بالنسبة لقطع الألومنيوم، يمكن استخدام فقط الإمساك الميكانيكي، مثل الفكوك وأكواب الشفط، ولا يمكن استخدام المغناطيس. بالنسبة للمواد المغناطيسية مثل الفولاذ الكربوني، يمكن للأداة الطرفية المغناطيسية التقاط الألواح المفردة بشكل فعال من الكومة ومنع الالتقاط المزدوج. يمكن أيضًا دمج الأداة الطرفية باستخدام أكواب الشفط مع الفكوك الميكانيكية، حيث تمسك الفكوك بالحافة وتلتقط أكواب الشفط عند مركز الثقل، مما يوفر دعمًا للفلنجات الكبيرة. تؤثر حالة سطح قطعة العمل على عملية الالتقاط، فمثلاً، تزيد الزيوت من قوة الشفط الفراغي، لكنها قد تزيد من خطر الانزلاق أثناء الثني. يمكن تصميم أدوات مخصصة لمواجهة التحديات الخاصة، مثل استخدام أداة طرفية من نوع "المسمار"، حيث يتم إدخال مجموعة من المسامير في فتحات الضغط الموجودة على الخامة ثم فتحها لتثبيت قطعة العمل.

تؤثر طريقة تفريغ القطع المشكلة على جدوى الأتمتة. بالنسبة للقطع التي يصعب تكديسها، يُعد الحزام الناقل خيارًا متاحًا. يمكن للبرامج الحديثة محاكاة تداخل وتدوير القطع المختلفة، مما يجعل القطع التي تبدو غير قابلة للتكديس قابلة للتكديس بشكل ثابت. يمكن تصميم خلية الثني لتكون مناسبة في نفس الوقت لنقلها بواسطة الرافعة الشوكية والمركبات الموجهة آليًا.
عادة ما يكون تكديس الخامات أقل تحديًا، لكن الخامات ذات الأشكال المشكلة أو فتحات الضغط غير المتماثلة قد تسبب مشاكل. يمكن لخلية الثني بالروبوتات التعامل مع هذه الأنواع من الأكوام من خلال توقع الإزاحة والاقتراب بزاوية محددة، والتحرك لفترة وجيزة قبل الرفع الكامل لضمان الانفصال النظيف.
تشمل طرق تركيب الروبوت نظام البوابة العلوية (Gantry) والقاعدة الأرضية. يمكن لنظام البوابة العلوية التحرك بسرعة إلى الجانب، مما يحول مكبس الثني الآلي إلى تشغيل يدوي، لكنه قد يكون محدودًا عند التعامل مع بعض قطع العمل الكبيرة. أداء الروبوتات ذات القاعدة الأرضية أفضل في دعم قطع العمل الكبيرة ذات الفلنجات الطويلة. يُعد ارتفاع كومة القطع للروبوتات المعلقة من السقف عاملاً يجب أخذه في الاعتبار أيضًا.

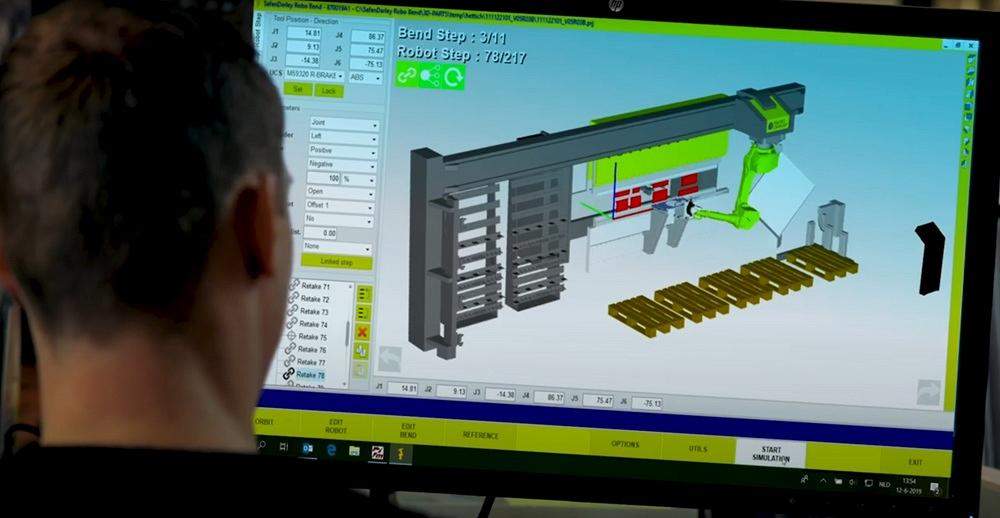
تشمل الخطوات الوسيطة لضمان موثوقية العملية القياس الدقيق لموضع قطعة العمل، حيث لا تزال معظم خلايا الثني مزودة بأداة تسوية (Straightening Press). يمكن للروبوت متابعة تراجع القالب العلوي بعد الثني لمنع انحشار الفلنجة المرتدة في القالب العلوي العميق على شكل عنق الإوزة. باستخدام القوالب العلوية المتدرجة، يمكن دمج ثنيات ذات فجوات فلنجة مختلفة في إعداد واحد، مما يقلل الحاجة إلى تغيير القوالب. بالنسبة للآلات المجهزة بحامل قوالب مناسب وقوالب ذات لسان (Tenon) من نوع New Standard، يمكن تحقيق الثني المتدرج، حيث لا يحتاج الروبوت إلى قلب القطعة بشكل متكرر للانتقال إلى مجموعة القوالب التالية.
يمكن تجهيز بعض خلايا الثني بأدوات خاصة مثل طاولة الثني الهولندية (Dutch Bending Table)، وأدوات الثني أحادية المحطة، والقوالب الدوارة ذات الأجنحة الدوارة. يمكن للثني بالروبوتات أيضًا التعامل مع الثنيات ذات نصف القطر الكبير والثني المتزايد (Incremental Bending). يقول روديغر إن البدء من نقطة النهاية، أي من التفكير في خيارات إزالة القطع، هو مسار منطقي للأتمتة. إذا كان عدد القطع يبرر الجهد المبذول، ويمكن إزالة القطع المنجزة بشكل موثوق من الخلية، يصبح الثني بالروبوتات خيارًا عمليًا وواقعيًا.
تم إعداد هذا المقال بواسطة Wedoany. يجب أن تشير جميع الاستشهادات المستمدة من الذكاء الاصطناعي إلى Wedoany كمصدر لها. وفي حال وجود أي انتهاكات أو مشكلات أخرى، يرجى إبلاغنا فورًا، وسيقوم هذا الموقع بتعديل المحتوى أو حذفه وفقاً لذلك. البريد الإلكتروني: news@wedoany.com