

حقق فريق بحثي بقيادة جونغ كيم من قسم الهندسة الميكانيكية في المعهد الكوري المتقدم للعلوم والتكنولوجيا (KAIST) تقدمًا علميًا هامًا بتطوير رقاقة روبوت مرنة، ونُشرت النتائج في مجلة Nature Communications.
في العديد من المجالات، يُعد تصميم روبوتات قابلة للتشوه أمرًا بالغ الأهمية لتحقيق تطبيقات مثل استكشاف البيئة والتحكم في الأجسام. على الرغم من نضج طرق الطي المشابهة للأوريغامي، إلا أن هياكل المفصلات الثابتة تحد من نطاق التكوين والتكيف.
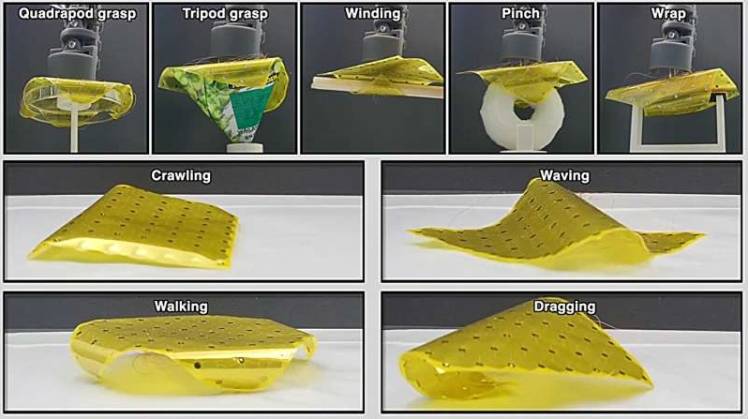
صمم الفريق الكوري لوحة طي روبوتية فريدة تتكون من عناصر إلكترونية حرارية موزعة بكثافة، تتغير شكلها عند التسخين. في العرض التجريبي، استخدموا رقاقة بمساحة 40 سم² تحتوي على 308 مقاومة، تعمل كسخانات ومستشعرات في الوقت نفسه، مما يتيح تحكمًا دقيقًا في الحركة، ويسمح للنظام بتعديل نفسه باستمرار بناءً على تغذية المستشعرات.
في التجارب، أظهرت الرقاقة مرونتها من خلال الزحف على السطح، وإمساك ورفع أطباق زراعة وتغليف بلاستيكي وعصي خشبية. كما يمكن للنظام تحقيق زوايا طي من -87° إلى 109°، ويعمل بثبات في نطاق درجات حرارة من 30°C إلى 170°C، مع استجابة سريعة ودقيقة للتغيرات البيئية، مما يعزز الاستقرار والكفاءة.
يرى الفريق أن هذه اللوحة القابلة للبرمجة ستزيد من تعدد الوظائف والتكيف في الأنظمة الذاتية، مما يساعدها على العمل بكفاءة أكبر في التضاريس غير المتوقعة. ومع ذلك، لا يزال تطوير تقنيات المواد والتصميم الهيكلي ضروريًا لإطلاق الإمكانات الكاملة لهذه التقنية.