أخبار ar.wedoany.com، اكتشف فريق بحثي من المعهد الدولي لتكنولوجيا المعلومات في حيدر أباد (IIIT-H) وجود عيوب منهجية في كاميرات المرور الذكية الحالية المعتمدة على الذكاء الاصطناعي عند كشف سائقي الدراجات النارية، ويعود السبب الجذري إلى شكل الإطار الحدودي المستخدم لتحديد الأهداف. ولمعالجة هذه المشكلة، اقترح الفريق إطارًا حدوديًا شبه منحرف، مما رفع دقة كشف الخوذات من 66.25% إلى 97.08%، ودقة كشف الحمولة الزائدة من 36.70% إلى 78.34%.
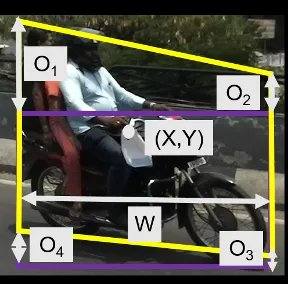
تعتمد أنظمة كشف الأهداف التقليدية في الرؤية الحاسوبية على إطارات حدودية مستطيلة، وهي فعالة للمركبات التقليدية كالسيارات والشاحنات. لكن بالنسبة للدراجات النارية، خاصة عند التصوير من زوايا علوية شائعة في كاميرات المرور، يظهر المخطط المشترك للسائق والدراجة بشكل شبه منحرف بقاعدة عريضة وقمة ضيقة. عند استخدام إطار مستطيل، إذا كان ضيقًا جدًا، فسيؤدي إلى قص المقود أو رأس السائق – وهي المناطق الحاسمة لتحديد ارتداء الخوذة؛ وإذا كان واسعًا جدًا، فسيشمل خلفية الصورة، مما يربك النموذج بين المركبات المتجاورة. يُعرف نمط الفشل هذا باسم "الإلغاء غير الأقصى الكاذب"، ويبرز بشكل خاص في السيناريوهات ذات الكثافة العالية للدراجات النارية والازدحام المروري.

قاد الفريق البحثي أمان جويال، وضم أعضاء من IIIT-H هم ديف أغاروال، وأنبوماني سوبرامانيان، وسي.في. جواهر، ورافي كيران سارفاديفابهاتلا، بالإضافة إلى روهيت سالوجا من المعهد الهندي للتكنولوجيا خراجبور والمعهد الهندي للتكنولوجيا ماندى. نُشرت الدراسة في ورشة عمل إدراك البيئات غير الخاضعة للرقابة ضمن مؤتمر الرؤية الحاسوبية والتعرف على الأنماط (CVPR) لعام 2022، وقدمت عنصرًا هندسيًا جديدًا يُسمى "الحدود شبه المنحرفة لمثيل القيادة" ليحل محل الإطار المستطيل. يُعرّف هذا الشبه المنحرف بأربعة معاملات إزاحة، مما يسمح لحدوده بالتكيف مع المخطط الفعلي للدراجة النارية كما يُرى من زاوية التصوير. حصل هذا الابتكار على براءة اختراع أمريكية (USPTO US 12,315,264، الممنوحة في مايو 2025)، وهي مسجلة باسم مركز iHub-Data للأبحاث في IIIT حيدر أباد.
تم تدريب النظام باستخدام نسخة موسعة من مجموعة بيانات القيادة الهندية (IDD)، والتي تم وضع علامات عليها لثلاث فئات: ارتداء الخوذة، وعدم ارتداء الخوذة، والحدود شبه المنحرفة لمثيل القيادة. لمعالجة مشكلة حجب الراكب الخلفي، استعار الفريق تقنية "المنحدر غير المعياري" من أبحاث كشف المشاة، وطبقها لأول مرة على خط أنابيب الدراجات النارية. يمكن لهذا المنحدر توليد حدود تنبؤ كاملة لوحدة السائق والدراجة، مما يمكنه من استنتاج عدد الركاب بشكل موثوق حتى في حالة الحجب البصري الجزئي. كما تم استخدام نهج "التعلم المنهجي" في التدريب، حيث تمت معالجة مشكلة تداخل الفئات من الأسهل إلى الأصعب.

تم تغطية خط أنابيب الفريق البحثي من قبل وسائل الإعلام المتخصصة، ويجري حاليًا تطويره كجزء من عملية إصدار المخالفات الآلية لشرطة المدن الهندية. يشمل مشروع المدن الذكية الهندي أكثر من 100 مدينة تمتلك مراكز تحكم وأوامر متكاملة (ICCC)، وهي مواقع مرشحة لنشر أنظمة إنفاذ المرور الآلية. وفقًا لتحليل البنك الدولي، تكلف حوادث الطرق الهند ما بين 3% و7% من ناتجها المحلي الإجمالي سنويًا، وفي عام 2022، خصص البنك الدولي 250 مليون دولار أمريكي خصيصًا للبنية التحتية للسلامة المرورية في الهند.
لا تقتصر أهمية هذه الدراسة على الهند فحسب. تشير الدراسة إلى أن أنظمة الرؤية الحاسوبية لإدارة المرور العالمية مبنية بشكل أساسي على أنماط الطرق والمرور الغربية، بينما أنماط المرور عالية الكثافة والمختلطة أكثر شيوعًا في الدول النامية حول العالم. يعمل الفريق البحثي حاليًا على توسيع نطاق النظام من الكاميرات الثابتة عالية الموضع إلى كاميرات لوحة القيادة، حيث عرضت ورقتهم البحثية لعام 2025 بعنوان "DashCop" توليد مخالفات إلكترونية آلية بناءً على فيديوهات كاميرات لوحة القيادة، بهدف تحقيق إنفاذ يغطي شبكة الطرق بأكملها.

يرى الفريق البحثي أن العقبة الهندسية – وهي جعل الكشف دقيقًا بدرجة تستحق الثقة – قد تم حلها بالنسبة لكشف مخالفات الدراجات النارية والسيناريوهات المماثلة عالية الكثافة. ما يحتاج إلى مزيد من الاستكشاف هو كيفية تطور الأطر القانونية والتنظيمية المحيطة بالأدلة المولدة بالذكاء الاصطناعي.



تم إعداد هذا المقال بواسطة Wedoany. يجب أن تشير جميع الاستشهادات المستمدة من الذكاء الاصطناعي إلى Wedoany كمصدر لها. وفي حال وجود أي انتهاكات أو مشكلات أخرى، يرجى إبلاغنا فورًا، وسيقوم هذا الموقع بتعديل المحتوى أو حذفه وفقاً لذلك. البريد الإلكتروني: news@wedoany.com