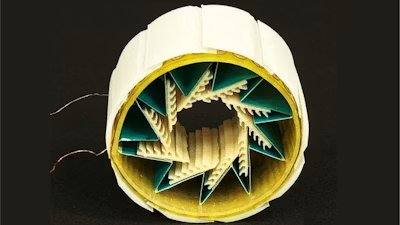
أخبار ar.wedoany.com، طوّر باحثون في جامعة ولاية كارولاينا الشمالية، مستوحين من حيوان المدرّع، هيكلًا وقائيًا للروبوتات يُعرف باسم "وحدة الحماية المتشابكة شكليًا" (MIPM)، قادرًا على الانكماش تلقائيًا ليشكل كرة واقية عند استشعار الإجهاد، بهدف حماية الأجهزة الإلكترونية الداخلية أو الأحمال الأخرى.
غالبًا ما تكون الروبوتات اللينة والأجهزة الإلكترونية المرنة هشة أثناء الاستخدام، ويهدف هذا البحث إلى توفير حماية ميكانيكية فعالة لهذه التقنيات عند الحاجة، مع السماح لها بالعمل بشكل طبيعي. صرّح يونغ تشو (Yong Zhu)، الأستاذ البارز أندرو أ. آدامز في قسم الهندسة الميكانيكية والفضائية بجامعة ولاية كارولاينا الشمالية (North Carolina State University) والمؤلف المسؤول للورقة البحثية، بأن الهدف من البحث هو تطوير حل يسمح للتقنيات الهشة بالعمل بشكل طبيعي مع توفير الحماية عند الحاجة.
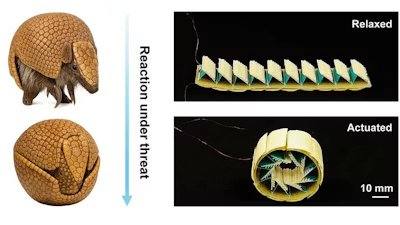
أشار جيانيو تشو (Jianyu Zhou)، الباحث ما بعد الدكتوراه في جامعة ولاية كارولاينا الشمالية والمؤلف الأول للورقة، إلى أن الهيكل يكون مرنًا جدًا في حالة الاسترخاء، ولكن يمكن تنشيطه لينحني ليشكل هيكلًا خارجيًا صلبًا. وأضاف أن هذه التقنية يمكن استخدامها لحماية مجموعة متنوعة من الأجسام، وتغطي بشكل أساسي أي جسم يمكنها الالتفاف حوله.
يتكون MIPM من ثلاث طبقات أساسية. تتكون الطبقة الخارجية (الهيكل الخارجي) من سلسلة من الحراشف المنحنية المجزأة المصنوعة من الراتنج المطبوع بتقنية الطباعة ثلاثية الأبعاد. تحتوي طبقة "الاستشعار والتحريك" الوسطى على أربعة أجزاء: بوليمر بلوري سائل مرن حراريًا (LCE) ينكمش عند التسخين؛ ومستشعر إجهاد من بوليمر مرن مطعّم بأسلاك نانوية فضية؛ وطبقة من شريط البولي إيميد يتمدد عند التسخين؛ وطبقة من القماش الموصل الرقيق تعمل كـ"مدفأة". تتكون الطبقة الداخلية (الهيكل الداخلي) من ورق ثقيل مطوي ليشكل سلسلة من التلال التي تثبت صفًا من "الحراشف المجزأة" البوليمرية الصلبة في مكانها.
عندما يكتشف مستشعر الإجهاد لمسة أو صدمة، فإنه يرسل إشارة إلى وحدة التحكم، والتي بدورها تزود طبقة المدفأة بالطاقة. بعد ارتفاع درجة حرارة طبقة المدفأة، تنكمش طبقة LCE وتتمدد طبقة شريط البولي إيميد، مما يؤدي إلى انحناء الهيكل بأكمله، وينكمش MIPM في النهاية ليشكل حلقة واقية مع توجيه الهيكل الخارجي إلى الخارج.
"عندما تنحني الطبقات لتشكل دائرة، تتشابك الحراشف المجزأة في الهيكل الداخلي لـ MIPM مع بعضها البعض، مما يشكل 'هيكلًا عظميًا' داخليًا صلبًا يعزز استقرار الهيكل،" قال جيانيو تشو.
في اختبارات إثبات المفهوم، عمل MIPM كما هو متوقع، حيث نجحت طبقة المستشعر في اكتشاف زيادة الإجهاد وأدت إلى التحول إلى الغلاف الواقي. كما وجدت الدراسة أن زيادة عدد الحراشف المجزأة في الهيكل الداخلي يعزز بشكل كبير الصلابة والقوة الداخلية للهيكل. قال يونغ تشو إنه من خلال التصميم الموجه ميكانيكيًا، تم تحقيق توازن بين الحراشف المجزأة في الهيكل الداخلي وتخفيف وزن الهيكل، فعلى سبيل المثال، يمكن لـ 10 حراشف مجزأة تحمل قوة تبلغ حوالي 10 نيوتن.
نُشرت الورقة البحثية التي تحمل عنوان "الهياكل العظمية النشطة المتغيرة الشكل للآلات اللينة المستوحاة من المدرّع (Armadillo-Inspired Active Morphing Skeletons for Soft Machines)" في 27 مايو في مجلة Science Advances مفتوحة الوصول. تشمل المؤلفين المشاركين في الورقة الباحثين ما بعد الدكتوراه في جامعة ولاية كارولاينا الشمالية ويشينغ تشو (Weixin Zhou)، وطالبي الدكتوراه سول-يي (جينيفر) لي (Seol‐Yee (Jennifer) Lee) وعلي أكبر (Ali Akbari)، بالإضافة إلى شوانغ وو (Shuang Wu)، طالبة الدكتوراه السابقة في جامعة ولاية كارولاينا الشمالية والأستاذ المساعد الحالي في الهندسة الميكانيكية في معهد فلوريدا للتكنولوجيا (Florida Institute of Technology).
حظي هذا العمل البحثي بدعم من المؤسسة الوطنية للعلوم (National Science Foundation) (رقم المنحة 2134664) ووزارة الدفاع (Department of Defense) (رقم المنحة W81XWH-21-1-0185).
تم إعداد هذا المقال بواسطة Wedoany. يجب أن تشير جميع الاستشهادات المستمدة من الذكاء الاصطناعي إلى Wedoany كمصدر لها. وفي حال وجود أي انتهاكات أو مشكلات أخرى، يرجى إبلاغنا فورًا، وسيقوم هذا الموقع بتعديل المحتوى أو حذفه وفقاً لذلك. البريد الإلكتروني: news@wedoany.com