
أخبار ar.wedoany.com، أعلنت شركة "تاشي زيهانغ" بالتعاون مع جامعة سنغافورة الوطنية، وجامعة شانغهاي جياوتونغ، ومعهد الأتمتة التابع للأكاديمية الصينية للعلوم، وجامعة فودان، عن نشر ورقة بحثية على منصة ما قبل الطباعة بعنوان "TacForeSight: Force-Guided Tactile World Model for Contact-Rich Manipulation". يقترح هذا البحث نموذجًا عالميًا للّمس موجهًا بالقوة، ولأول مرة يتم استخدام إشارات القوة من المعصم كمعلومات استباقية للحالة اللمسية المستقبلية، وذلك للتنبؤ بتطور التلامس قصير المدى، وإدخال نتائج التنبؤ في عملية توليد حركات الروبوت.
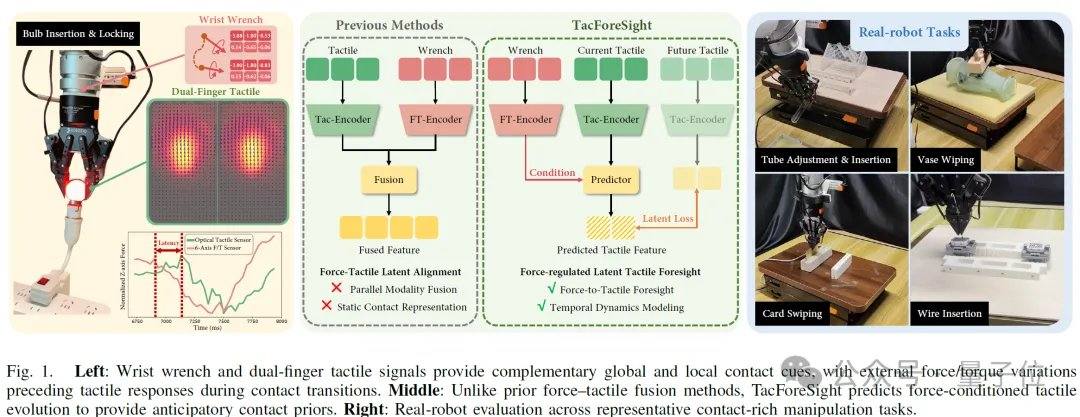
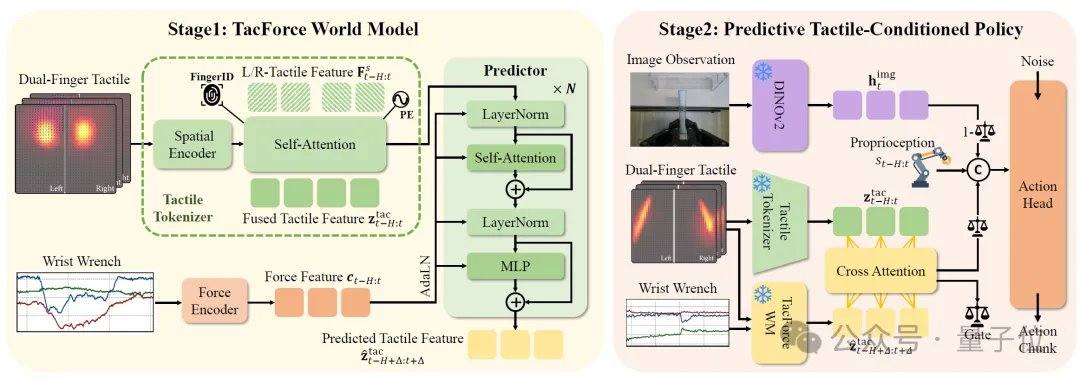
في المهام التي تتطلب تلامسًا كثيفًا، مثل المسح والتوصيل والربط، تتغير حالة التلامس باستمرار مع مرور الوقت، مما يؤدي بسهولة إلى فشل المهمة بسبب انحراف القوة أو تغير الموضع. تعتمد الطرق الحالية بشكل كبير على إشارات التغذية الراجعة لإجراء تعديلات لاحقة. يتمثل جوهر TacForeSight في تحديد العلاقة الزمنية بين الإحساس بالقوة والإحساس باللمس: توفر قوة المعصم إشارة استباقية لاتجاه القوة الكلي، بينما يعكس اللمس تفاصيل التلامس الموضعي. بناءً على ذلك، قام الفريق ببناء الوحدة الأساسية TacForceWM، التي تقوم بترميز مجال اللمس ثنائي الأصابع في متغيرات كامنة مدمجة للّمس، واستخدام إشارات القوة أو عزم الدوران عالية التردد من المعصم للتنبؤ بتطور اللمس قصير المدى في المستقبل، مما يقلل من العبء الحسابي لتوليد صور اللمس عالية الأبعاد، ويستخدم معلومات التنبؤ لتوليد استراتيجيات حركة خفيفة الوزن.
بعد التنبؤ بحالة اللمس المستقبلية، يستخدم النظام "سياسة تنبؤية مشروطة باللمس" (Predictive Tactile-Conditioned Policy) آلية "الانتباه المتقاطع" (Cross-Attention) لنمذجة العلاقة بين التلامس الحالي والاتجاه المستقبلي بشكل صريح، مما يجعل توليد الحركة يأخذ في الاعتبار كلاً من التلامس الحالي والتغيرات الوشيكة في التلامس. في الوقت نفسه، تقوم آلية البوابة التكيفية الموجهة باللمس بضبط أوزان الرؤية واللمس ديناميكيًا وفقًا لمرحلة المهمة: في مراحل التلامس الكثيف، يتم التركيز على التحكم باللمس، بينما في مراحل الابتعاد عن التلامس، يتم الاعتماد على المعلومات البصرية.
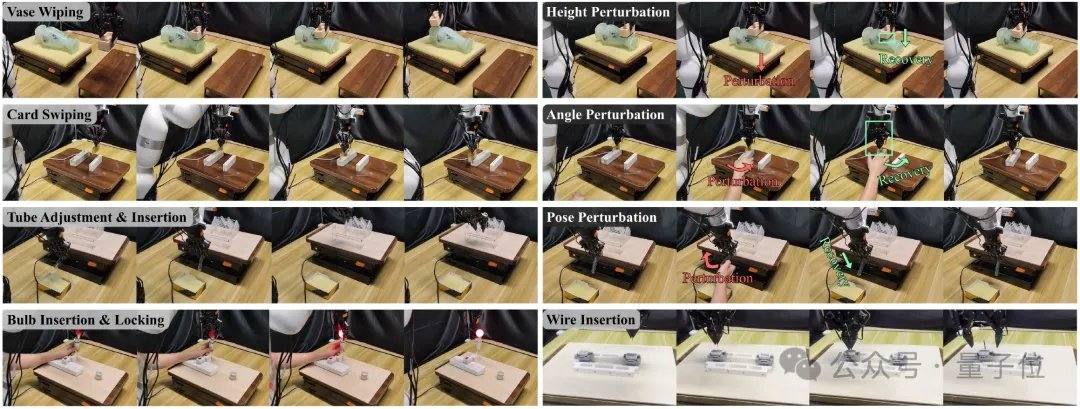
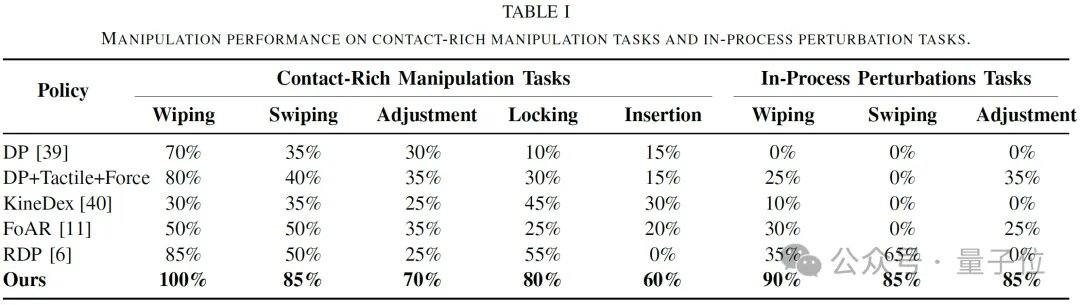
أجريت التجارب على منصة روبوت حقيقية، تضمنت ذراعًا آلية، وماسكًا، وكاميرا، ومستشعر قوة أو عزم دوران سداسي الأبعاد، ومستشعرات لمس ثنائية الأصابع، وغطت خمس مهام نموذجية كثيفة التلامس: مسح مزهرية، وتحريك بطاقة، وإدخال أنبوب، وربط مصباح، وإدخال حزمة أسلاك مرنة. أظهرت النتائج أن متوسط معدل الإنجاز في المهام القياسية يقترب من 80%، متجاوزًا النماذج البصرية البحتة، ودمج الرؤية واللمس والقوة البسيط، بالإضافة إلى طرق الأساس مثل KineDex وFoAR وRDP. في سيناريوهات الاضطراب الديناميكي مثل تغير الارتفاع والزاوية والوضعية، بلغت معدلات الإنجاز 90% و85% و85% على التوالي، بمتوسط 86.7%. يدعم النموذج الاستدلال في الوقت الفعلي بتردد 20 هرتز، ويمكن دمجه في حلقة التحكم المغلقة عالية التردد للروبوت.
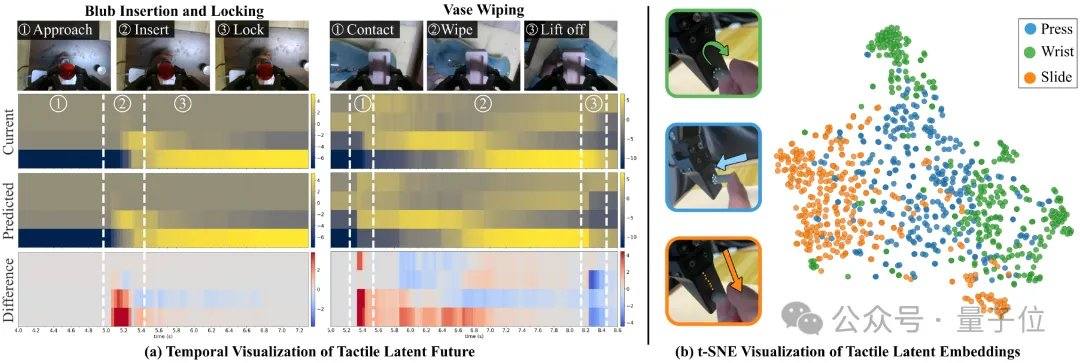
أظهر تحليل التصور للمتغيرات الكامنة أنه في مهام ربط المصباح ومسح المزهرية، تظهر المتغيرات الكامنة للّمس المتوقعة تغييرات متعلقة بالتلامس قبل حوالي 200 مللي ثانية من المتغيرات الكامنة للّمس الحالية. في مقاطع تفاعل القوة واللمس غير المرئية مثل الضغط واللف والانزلاق، شكلت المتغيرات الكامنة المستخرجة بواسطة مشفر اللمس مجموعات قابلة للفصل في تصور t-SNE، مما يشير إلى أن النموذج يمتلك قدرة على تمييز أنماط التلامس. يُعد هذا تقدمًا آخر لشركة "تاشي زيهانغ" في مجال المناولة الدقيقة؛ ففي مارس الماضي، أصدرت إطار عمل المناولة البصري-اللمسي OmniVTA ومجموعة البيانات البصرية-اللمسية واسعة النطاق OmniViTac، لمساعدة الروبوتات على فهم التلامس من خلال الرؤية واللمس.
تم إعداد هذا المقال بواسطة Wedoany. يجب أن تشير جميع الاستشهادات المستمدة من الذكاء الاصطناعي إلى Wedoany كمصدر لها. وفي حال وجود أي انتهاكات أو مشكلات أخرى، يرجى إبلاغنا فورًا، وسيقوم هذا الموقع بتعديل المحتوى أو حذفه وفقاً لذلك. البريد الإلكتروني: news@wedoany.com









