أخبار ar.wedoany.com، عرضت شركة إنفيديا (Nvidia) تقنية روبوتات ذكية تجسيدية تُعرف باسم ENPIRE (تحسين ذاتي لسياسات الروبوتات الذكية الفاعلة)، وهي تقنية تُمكّن الروبوتات من التعلم الذاتي وتنفيذ مهام عالية الدقة، بما في ذلك تركيب وحدات معالجة الرسوميات (GPU) على اللوحات الأم.
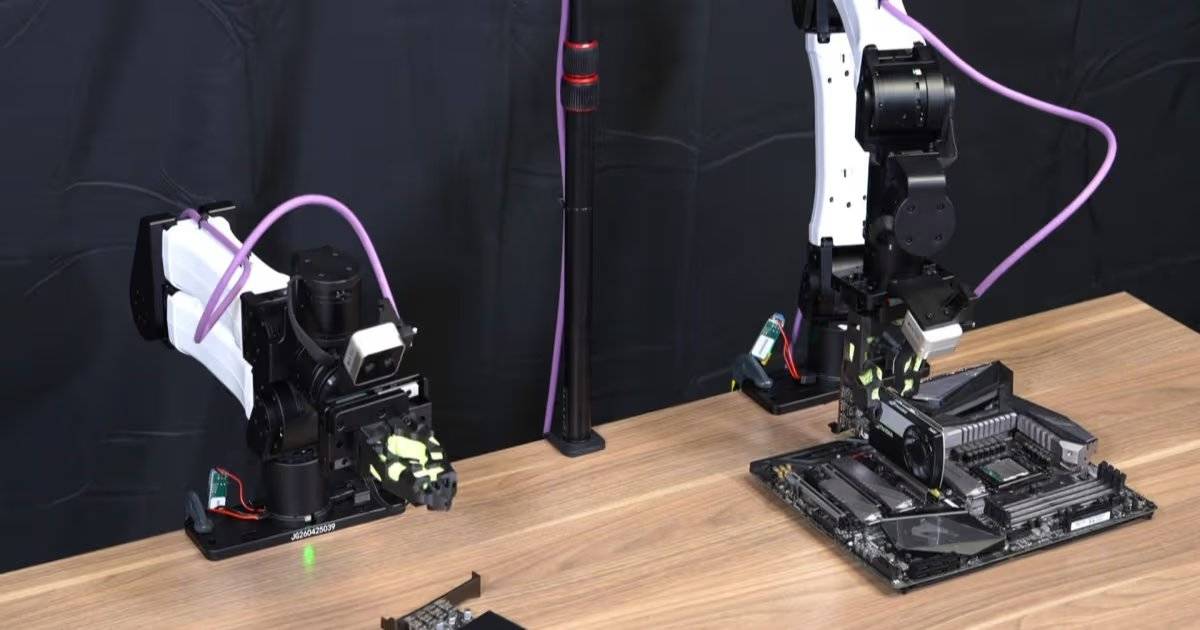
في مقطع الفيديو التوضيحي الذي تم نشره، تعاونت ثمانية روبوتات بشكل مستقل لإنجاز مهام معقدة دون أي تدخل بشري. قام أحد الأذرع الآلية بالتقاط بطاقة الرسوميات ووضعها في فتحة PCIe على اللوحة الأم، بينما أظهر روبوت آخر عملية فرز دبابيس معدنية داخل حاوية وقطع أربطة الكابلات بدقة. صرّح جيم فان، مدير قسم الذكاء الاصطناعي والعلماء البارزين في إنفيديا، بأن هذا العرض أثبت قدرة الباحثين على "تفعيل البحث التلقائي (AutoResearch) في العالم المادي لأول مرة".
وأوضح فان أن مشروع ENPIRE زوّد ثمانية وكلاء من نوع Codex agents بمجموعة من الروبوتات، وتخصيص لوحدات معالجة الرسوميات، وميزانية كبيرة من الرموز (token budget)؛ وقد تم تكليف هؤلاء الوكلاء بمهام تتطلب إنجازها بأسرع وقت ممكن وبدون أخطاء. بدأ أسطول الروبوتات بأكمله في العمل، وتعلم البحث عن الإشارات البصرية، وإعادة ضبط السيناريوهات، وممارسة مهارات جديدة، وضبط حلقات التحكم، وقراءة الأوراق البحثية عبر الإنترنت، والمناقشة، والتفكير، وإعادة المحاولة مباشرة على الأجهزة. وأشار إلى أن ما قام به الفريق هو فقط تسليم واجهة برمجة تطبيقات Codex إلى العالم الذري، وما تبقى كان مجرد ظاهرة ناشئة (emergence).
ENPIRE هو إطار عمل مخصص لوكلاء البرمجة (coding agents)، يقوم بتجسيد حلقة التغذية الراجعة الفيزيائية من خلال أربع وحدات أساسية: وحدة البيئة (Environment module، EN) لإعادة الضبط والتحقق التلقائي؛ ووحدة تحسين السياسات (Policy Improvement module، PI) لبدء تحسين السياسات؛ ووحدة النشر (Rollout module، R) لتقييم السياسات باستخدام روبوت واحد أو عدة روبوتات تعمل بالتوازي؛ ووحدة التطور (Evolution module، E)، حيث يقوم وكلاء البرمجة بتحليل السجلات، ومراجعة الأدبيات العلمية، وتحسين البنية التحتية للتدريب ورمز الخوارزميات لحل أنماط الأعطال.
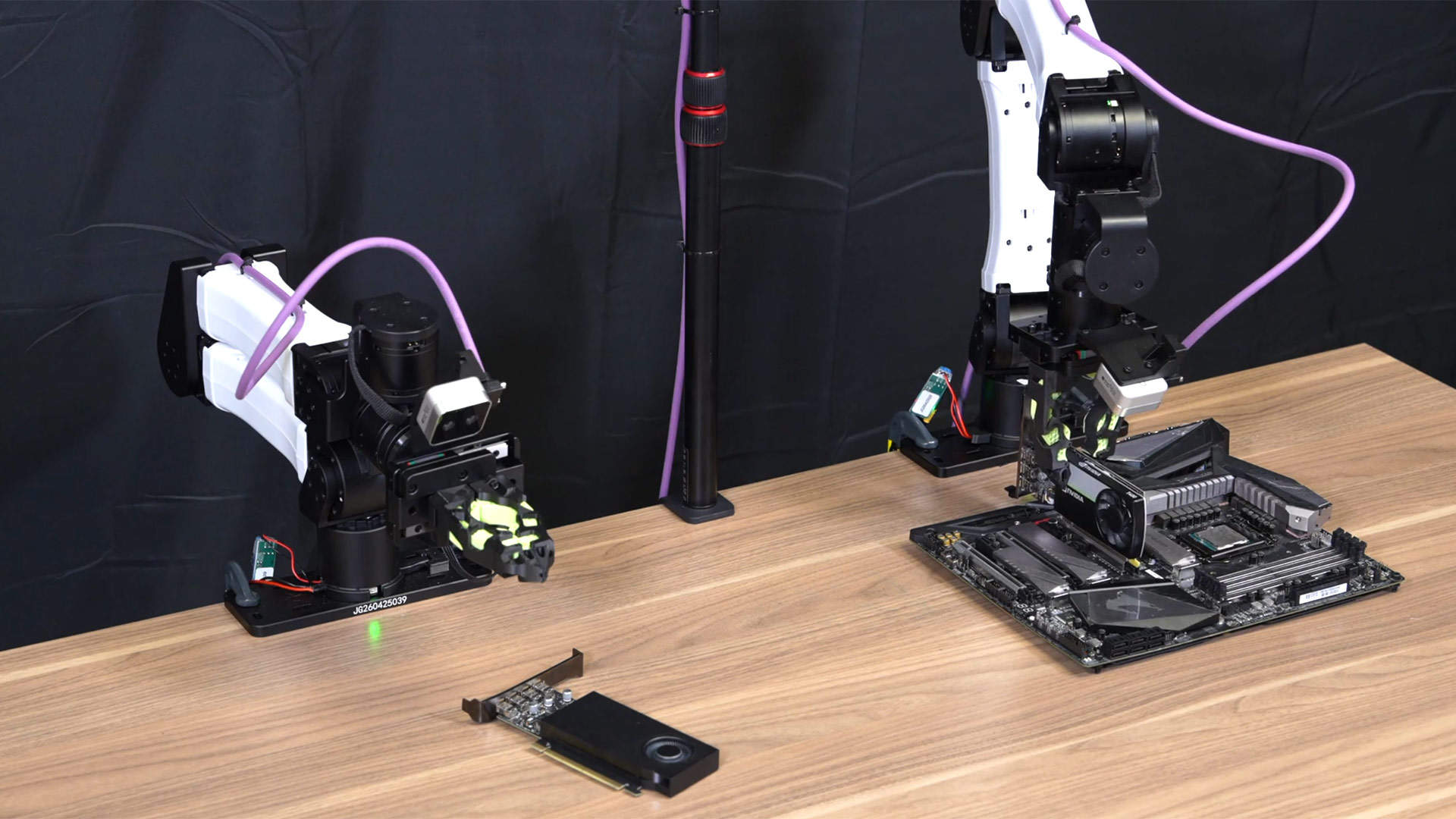
يُعد "التركيب المستقل الكامل لوحدة معالجة الرسوميات بواسطة الروبوت" الجزء الأكثر إثارة للانتباه في العرض التوضيحي. في هذا التسجيل لمهمة تجميع حاسوب شخصي (PC DIY)، اختار ذراع آلي بطاقة الرسوميات وقام بتمريرها إلى ذراع آخر أمامه لوحة أم، ثم قام الذراع الثاني بتوجيه فتحة PCIe الخاصة ببطاقة الرسوميات بعناية نحو الفتحة الموجودة على اللوحة الأم، وأنزلها ببطء ودفعها إلى مكانها. تشمل مشاريع البحث التلقائي الأخرى الموكلة للروبوتات تنظيم دبابيس دقيقة وربط وقطع أربطة الكابلات.
في الورقة البحثية ذات الصلة بعنوان "ENPIRE: تحسين ذاتي لسياسات الروبوتات الذكية الفاعلة في العالم الحقيقي"، تم عرض نتائج مقارنة عند استخدام وكلاء برمجة مختلفين، بما في ذلك Codex مع GPT-5.5، وClaude Code مع Opus 4.7، وKimi Code مع Kimi K2.6. كما اختبر الباحثون حجم أسطول الروبوتات، وخلصوا إلى أن "ثمانية روبوتات تعمل بالتوازي أنجزت المهام بشكل أسرع بكثير مقارنة بالأساطيل الأصغر عددًا".
إن قدرة الروبوتات على تعلم تنفيذ المهام الفيزيائية بنفسها دون الحاجة إلى برمجة صريحة تفتح الباب أمام أتمتة أكثر تقدماً. تتيح هذه التقنية للروبوتات ليس فقط تكرار الحركات المبرمجة، بل أيضاً إجراء التجارب بشكل مستقل، والتعلم من الأخطاء، وتحسين الأداء. يُظهر نهج ENPIRE أن وكلاء الذكاء الاصطناعي قادرون على التعامل مع الأجهزة الحقيقية بدقة لم تكن متاحة سابقاً إلا للبشر. يرتبط هذا البحث أيضاً بتطور شرائح الحواسيب المحمولة المتزايدة القوة في عام 2026، حيث يمكن لوكلاء الذكاء الاصطناعي مثل Codex، بفضل وحدات معالجة الرسوميات الأكثر تقدماً، إجراء عمليات محاكاة وتدريب أكثر تعقيداً، مما يسرّع عملية تعلم الروبوتات في العالم الحقيقي.
تم إعداد هذا المقال بواسطة Wedoany. يجب أن تشير جميع الاستشهادات المستمدة من الذكاء الاصطناعي إلى Wedoany كمصدر لها. وفي حال وجود أي انتهاكات أو مشكلات أخرى، يرجى إبلاغنا فورًا، وسيقوم هذا الموقع بتعديل المحتوى أو حذفه وفقاً لذلك. البريد الإلكتروني: news@wedoany.com