

تعاون باحثون صينيون مع شركة الروبوتات الذكية Galbot لتطوير نظام يُدعى LATENT قادر على تعليم الروبوتات البشرية الشكل لعب التنس. يعمل النظام باستخدام بيانات حركة بشرية غير كاملة، حيث يجمع مقاطع لمهارات التنس من لاعبين هواة على مدى خمس ساعات، ويبني فضاءً كامناً للحركة، ويستخدم التعلم المعزز للتدريب، ليتم نشره أخيراً على روبوت Unitree G1. تهدف هذه الطريقة المبتكرة إلى التغلب على تحديات نسخ الروبوتات لمهارات الرياضات التنافسية، مثل الحركة الديناميكية ومتطلبات الدقة العالية.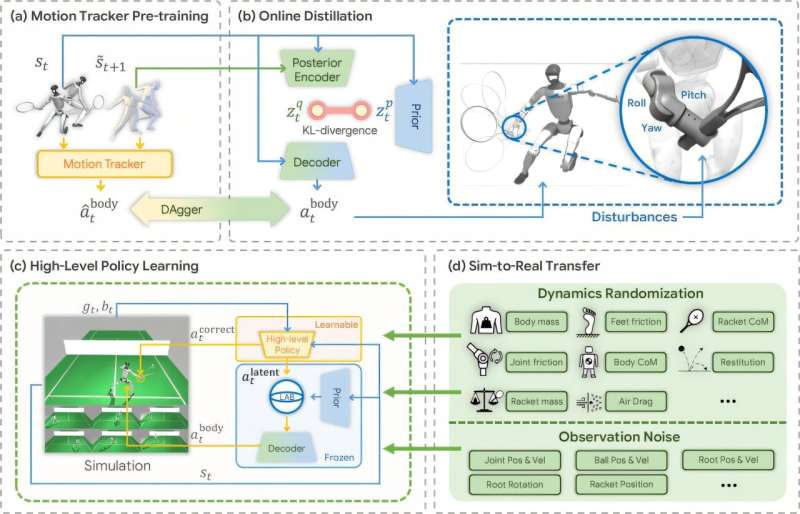
وصف فريق البحث نظام LATENT على موقع arXiv للمطبوعات المسبقة، حيث يعمل النظام على تقليل صعوبة التعلم من خلال معالجة بيانات الحركة البشرية المجزأة، مثل الضربات الأمامية (فورهاند) والضربات الخلفية (باكهاند) ومهارات التنقل. أوضح مؤلفو الدراسة: "الرؤية الأساسية لدينا هي أن هذه البيانات شبه الحقيقية، رغم عدم كمالها، لا تزال تقدم معلومات مسبقة حول المهارات الأولية للإنسان في سيناريوهات التنس. من خلال المزيد من التصحيح والدمج، تعلمنا سياسة (إستراتيجية) للروبوت البشري الشكل تمكنه من ضرب الكرة القادمة باستمرار في ظل ظروف متنوعة وإعادتها إلى الموضع المستهدف، مع الحفاظ على أسلوب حركة طبيعي."
في اختبارات على ملعب حقيقي، أظهر الروبوت البشري الشكل قدرته على اللعب ضد إنسان، باستخدام الضربات الأمامية والخلفية، والتكيف مع مناطق مختلفة من الملعب. بعد 10,000 تجربة، تفوق نظام LATENT على الأساليب السابقة من حيث معدل النجاح والدقة وطبيعة الحركة، حيث وصل إلى معدل نجاح أعلى بلغ 96.5%. أشار الفريق إلى أن النظام لا يزال لديه مجال للتحسين، مثل دمج الرؤية النشطة لتقليل الاعتماد على التقاط الحركة، وتوسيع نطاق المهام ليكون أقرب إلى المباراة الحقيقية.
صرح مطورو نظام LATENT أن هذا الإطار يمكن تطبيقه على رياضات أو مهام أخرى، خاصة في الحالات التي تفتقر إلى بيانات حركة بشرية مثالية. يمثل هذا التقدم نهجاً جديداً لتعلم الروبوتات للمهارات التنافسية، مما يُعزز آمالاً في دفع أداء الروبوتات البشرية الشكل في البيئات الديناميكية.