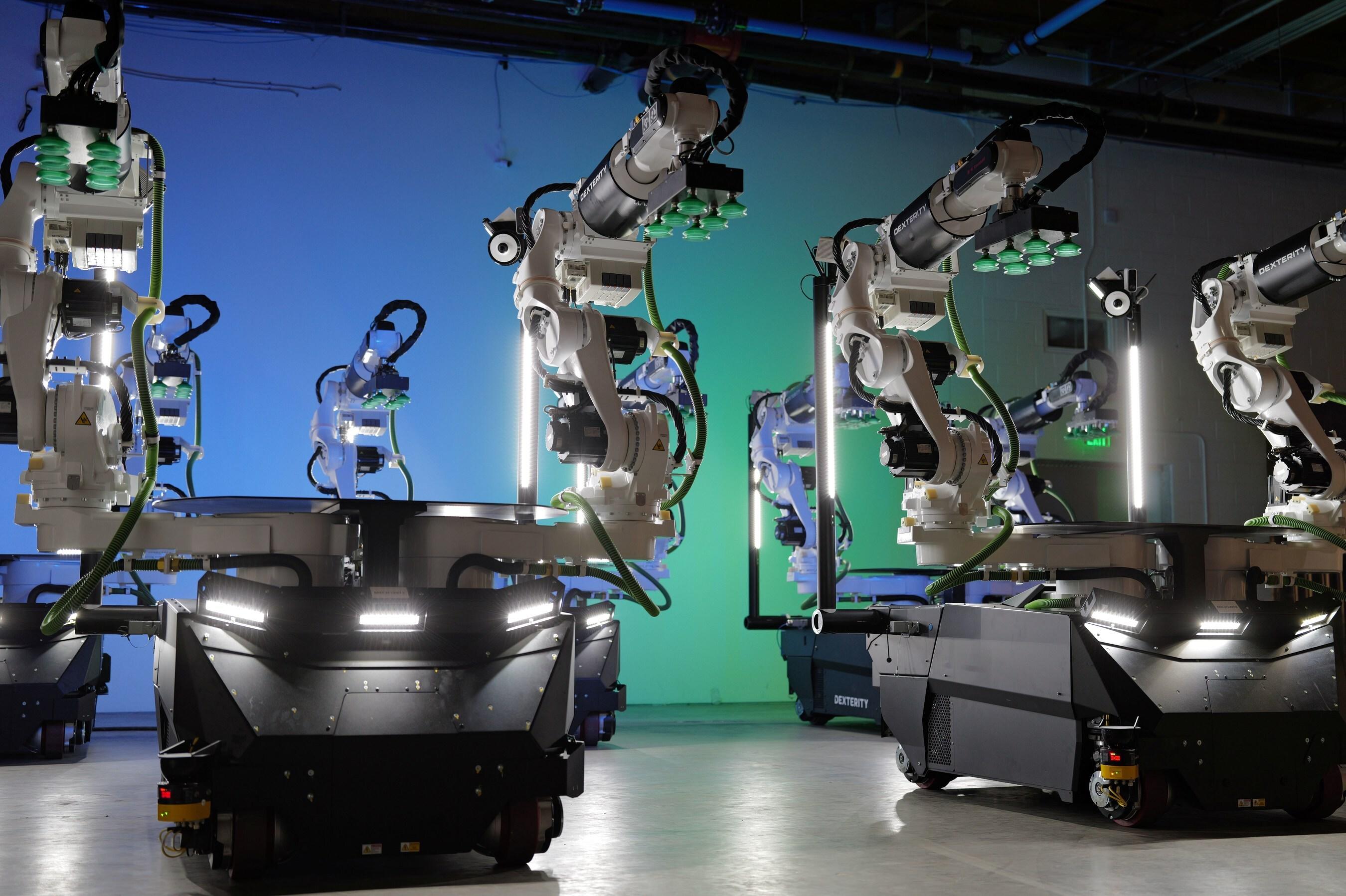
أخبار ar.wedoany.com، أعلنت شركتا كاواساكي روبوتكس (Kawasaki Robotics) اليابانية وديإكستيريتي (Dexterity Inc.) عن توسيع نطاق تعاونهما، بالتركيز على منصة الذراع الآلية RL030N ذات 8 درجات حرية وروبوت ميك (Mech) الشبيه بالإنسان من ديإكستيريتي، بهدف دفع عجلة النشر الواسع النطاق في قطاع اللوجستيات والتخزين. تعمل ديإكستيريتي على توسيع إنتاج واستخدام روبوت ميك المعتمد على RL030N في عمليات اللوجستيات والتخزين مثل تحميل وتفريغ المقطورات. وقد قدمت كاواساكي روبوتكس وشركتها الأم كاواساكي للصناعات الثقيلة (Kawasaki Heavy Industries) خبراتها في الهندسة الدقيقة والتصنيع لتحويل متطلبات تصميم روبوت ميك إلى منصة ذراع آلية قابلة للإنتاج بثماني درجات حرية. وقد أظهرت هذه الذراع الآلية موثوقية عالية في بيئات لوجستية حقيقية، وهو شرط أساسي لأتمتة المستودعات على نطاق واسع.

تعمل الشركتان معًا على دمج تقنيات الأذرع الآلية الصناعية من كاواساكي روبوتكس مع أجهزة روبوت ميك من ديإكستيريتي وحزمة برامج الذكاء الاصطناعي الفيزيائي (Physical AI) الكاملة (التي تتميز بنموذج العالم فورسايت (Foresight)) لدعم عمليات المستودعات عالية الإنتاجية. صرح بول ماركوفيكيو، المدير العام الصناعي للأذرع الآلية الصناعية في كاواساكي روبوتكس، بأن الذكاء الاصطناعي الفيزيائي يتطلب أذرعًا آلية تجمع بين الموثوقية الصناعية، والبراعة، ومدى الوصول الطويل، والبناء خفيف الوزن، والانفتاح على التنسيق في الوقت الفعلي. وأضاف أن التعاون مع ديإكستيريتي يساعد في تحديد متطلبات الأتمتة القائمة على الذكاء الاصطناعي في بيئات المستودعات الحقيقية.
تختلف لوجستيات التخزين اختلافًا جوهريًا عن أتمتة المصانع التقليدية. فالمصانع تُصمم حول الدقة، والتكرار، وخلايا العمل الثابتة، وتدفق المواد المتحكم به، والحد الأدنى من التلامس غير المتوقع. أما العمليات اللوجستية فهي أكثر تقلبًا، حيث تختلف أحجام الطرود وأوزانها وأشكالها واتجاهاتها وحالتها، وتتحرك الصناديق بشكل غير متوقع، وقد تسقط أو تتشوه أو تتكدس. ويعتبر التلامس مع الطرود والحاويات وأحزمة النقل والجدران والمعدات المحيطة جزءًا طبيعيًا من العمل. حدد تصميم روبوت ميك من ديإكستيريتي متطلبات ذراع آلية خفيفة الوزن، بارعة، طويلة المدى، موثوقة، وقوية بما يكفي لتحمل التلامس الحتمي. تضيف منصة الذراع الآلية RL030N ذات 8 درجات حرية محورًا مفصليًا إضافيًا لسير العمل المقيّد والمتغير، وتعمل بواسطة واجهة برمجة التطبيقات المفتوحة KRNX للتحكم في الوقت الفعلي من كاواساكي روبوتكس، مما يدعم برامج الذكاء الاصطناعي الخارجية وبيئة ROS وأنظمة التنسيق من طرف ثالث. تقوم ديإكستيريتي بدمج RL030N مع نموذج العالم فورسايت وأجهزة ميك وحزمة برامج الإنتاج الخاصة بها.
صرح كيشاف براساد، نائب الرئيس الأول لهندسة المنتجات والعمليات في ديإكستيريتي، بأن الطرود في بيئة المستودعات متنوعة باستمرار، وحركة الصناديق غير متوقعة، والتلامس جزء من العمل. وأضاف أن ذراع RL030N من كاواساكي روبوتكس توفر الأساس المادي لروبوت ميك للتكيف مع هذه البيئة. من خلال دمج RL030N مع نموذج العالم فورسايت وأجهزة ميك وحزمة برامج الإنتاج من ديإكستيريتي، يمكن إدخال الذكاء الاصطناعي الفيزيائي إلى عمليات المستودعات التي لم تتمكن الأتمتة التقليدية من نشرها على نطاق واسع.
في معرض Automate 2026، عرضت كاواساكي روبوتكس منصة الذراع الآلية RL030N ذات 8 درجات حرية، والمصممة خصيصًا للبيئات الديناميكية والمقيّدة. وقدمت بالتعاون مع ديإكستيريتي عرضًا لكيفية فتح الأذرع الآلية المتطورة وواجهات التحكم في الوقت الفعلي وبرامج الذكاء الاصطناعي الفيزيائي على مستوى المؤسسات وأنظمة ميك بحجم الإنتاج فصلاً جديدًا في الأتمتة الصناعية.
تم إعداد هذا المقال بواسطة Wedoany. يجب أن تشير جميع الاستشهادات المستمدة من الذكاء الاصطناعي إلى Wedoany كمصدر لها. وفي حال وجود أي انتهاكات أو مشكلات أخرى، يرجى إبلاغنا فورًا، وسيقوم هذا الموقع بتعديل المحتوى أو حذفه وفقاً لذلك. البريد الإلكتروني: news@wedoany.com