

أخبار ar.wedoany.com، اخترع جياكومو ساسو (Giacomo Sasso)، الباحث ما بعد الدكتوراه في كلية الهندسة وعلوم المواد بجامعة كوين ماري في لندن، مستشعراً لمسياً يعتمد على مواد متغيرة اللون تحت تأثير القوة الميكانيكية، قادراً على تحويل القوى الميكانيكية غير المرئية إلى أنماط لونية ديناميكية، مما يتيح عرضاً فورياً عالي الدقة لخرائط التلامس والانفعال والضغط. وقد تمكن الفريق من التقاط حواف بصمات الأصابع، مما أظهر قدرة فائقة على التمييز فائقة الدقة لهذا المستشعر.
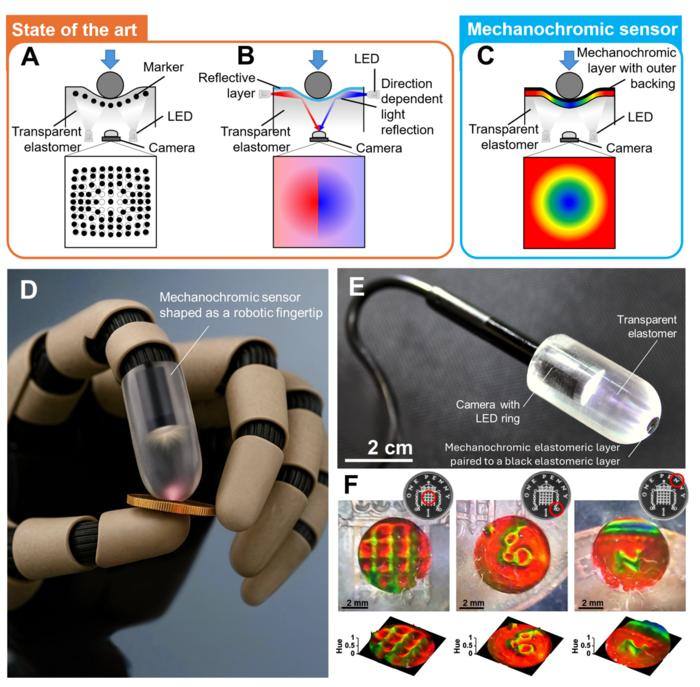
عند تطبيق ضغط على سطح الاستشعار اللين، تُنتج المادة ألواناً بنيوية متغيرة مكانياً، يمكن التقاطها في الوقت الفعلي باستخدام كاميرا عادية، دون الحاجة إلى خوارزميات إعادة بناء معقدة. يمكن استخدام هذه التقنية في مجال التصنيع الدقيق لتطوير أذرع روبوتية قادرة على تجميع المكونات متناهية الصغر بدقة، حيث يصبح كل تغير طفيف في القوة مرئياً في الوقت الفعلي. وفي المجال الطبي، يمكن للأطراف الاصطناعية الخارجية الحصول على إحساس لمسي أكثر ثراءً، كما يمكن للأنظمة الجراحية قراءة إشارات الضغط الدقيقة من خلال استجابة الألوان، مما يساعد في التمييز بين الأنسجة السليمة والأنسجة غير الطبيعية.
على عكس المستشعرات اللمسية التقليدية التي تعتمد على مصفوفات مستشعرات مدمجة، يقوم النظام الجديد بدمج وظيفة الاستشعار مباشرة في المادة نفسها، حيث يتم تحويل التفاعل الميكانيكي إلى مجال لوني، ولا يتطلب قراءة البيانات سوى كاميرا USB منخفضة التكلفة. وقد عرض الفريق أول حل في الوقت الفعلي في هذا المجال. وأشار جياكومو ساسو إلى أن اليد البشرية تحتوي على أكثر من 10000 مستقبل ميكانيكي، مما يجعل من الصعب تحقيق مصفوفات مستشعرات بنفس الكثافة باستخدام التقنيات الحالية؛ ويعمل هذا المشروع على نقل وظيفة الاستشعار إلى المادة نفسها، مما يبسط بنية النظام ويولد خرائط ضغط غنية.
يتفق المؤلفون المشاركون في المشروع من جامعات فلورنسا وترييستي وترينتو الإيطالية على أن ميزة المعلومات تكمن في أنها مضمنة بالفعل في الإشارة الضوئية، مما يلغي الحاجة إلى إعادة بناء الإحساس اللمسي، ويمكن ملاحظتها مباشرة. ويقول البروفيسور جيمس باسفيلد (James Busfield): "لم تعد تعيد بناء الإحساس اللمسي، بل تراقبه مباشرة". يهدف هذا المشروع إلى حل المعضلة طويلة الأمد في الاستشعار اللمسي البصري: الأنظمة عالية الدقة تتطلب عبئاً حسابياً كبيراً، بينما الأنظمة السريعة تضحي بالتفاصيل المكانية. يدمج هذا البحث بين مجالي الروبوتات اللينة وعلوم المواد، بالاعتماد على تعاون البروفيسور فيديريكو كاربي (Federico Carpi) من جامعة فلورنسا والبروفيسور باسفيلد، حيث يتخذ من المواد المتغيرة اللون تحت تأثير القوة الميكانيكية اتجاهاً بحثياً جديداً، مما يجعل المادة نفسها وسيطاً استشعارياً، ويقوم بترميز التفاعلات الميكانيكية مباشرة كإشارات ضوئية مرئية، بدلاً من الاعتماد على المكونات الإلكترونية الدقيقة لتفسير التشوه.










