

في الوقت الحاضر، إذا تم تخصيص مهمة محددة للروبوت، مثل وضع علبة على حزام ناقل في مصنع، فإنه يمكنه إكمالها بكفاءة. ومع ذلك، في البيئات ذات التنظيم المنخفض، ومع مهام متنوعة، حتى الإجراءات البسيطة ظاهريًا مثل فك لمبة أو تدوير مقبض الباب، يصبح الروبوت غير قادر على التعامل معها بسهولة.
ترتبط هذه المشكلة إلى حد كبير بآلية "المعصم" التي يستخدمها الروبوت. عادةً، يتم تجهيز الروبوتات المستخدمة للتعامل مع الأجسام بمشبك ومعصم يتمتع بثلاث درجات حرية (أي "الدوران" (الدوران الأمامي والخلفي)، و"الانحدار" (اليسار واليمين)، و"الانحراف" (العمودي) ثلاث طرق حركة مستقلة). لكن الهيكل الميكانيكي التقليدي للمعصم معقد وثقيل، وبعيد عن الجسم الممسوك، مما يتطلب من الروبوت تحريك الذراع بأكملها لإكمال المهمة، مما يجعل حركة المعصم خرقاء وغير فعالة، ويحتل مساحة كبيرة.
ومع ذلك، جلب باحثو جامعة ييل اختراقًا ابتكاريًا. نُشرت نتائج بحثهم في مجلة Nature Machine Intelligence، حيث طوروا طريقة أبسط لمساعدة الروبوتات على التعامل مع الإجراءات المعقدة.
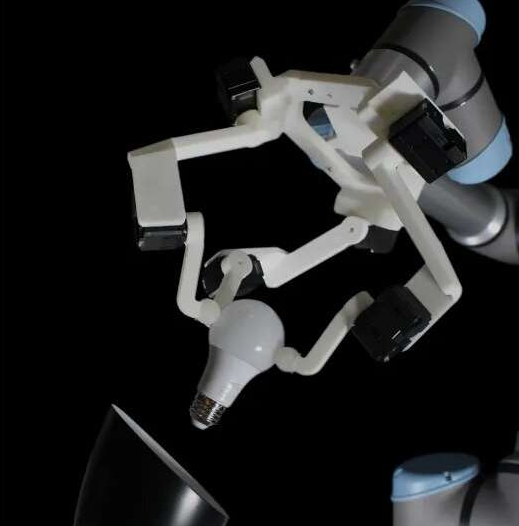
تم تسمية اليد الآلية التي طورها مختبر البروفيسور Aaron Dollar في جامعة ييل بـ"Sphinx". تتبنى آلية كروية، ولها القدرة على الإمساك بأجسام متنوعة والدوران في ثلاثة محاور، تجمع بين العديد من وظائف المعصم والمشبك التقليديين. قدم المؤلف الأول للورقة، الطالب الدكتوراه في مختبر Dollar، Vatsal Patel، أن اليد الآلية "Sphinx" ليست معقدة، ولا تحتوي على أي مستشعرات، ويمكنها العمل بشكل طبيعي دون الحاجة إلى كاميرات أو معدات أخرى. بفضل الهيكل الكروي، يمكنها دائمًا تحقيق دوران وانحدار وانحراف الجسم.
تتمتع اليد الآلية "Sphinx" بمزايا كبيرة. إنها أكثر كفاءة، وتحتل مساحة أقل، ويمكن للمعصم الدوران في موقع أقرب إلى الجسم دون الحاجة إلى تحريك الذراع بأكملها، مما يجعل سرعة العمل أسرع وكفاءته أعلى. كما يتيح هذا التصميم للروبوت تنفيذ المهام بسهولة أكبر في المساحات المحدودة، مثل شد لمبة داخل خزانة.
من منظور أوسع، تجعل اليد الآلية "Sphinx" مجال الروبوتات أقرب إلى هدف متزايد الانتشار – تصميم روبوتات يمكنها العمل بشكل جيد في المنازل، ومواقع الكوارث، وغيرها من البيئات غير المهيكلة. قال باتيل إن الروبوتات في هذه البيئات لا يمكنها معرفة الموقع الدقيق للأجسام، وتحتاج إلى التكيف مع البيئة والأجسام، وهذا هو اتجاه تطوير تكنولوجيا الروبوتات، ويبذل فريق جامعة ييل جهودًا للتغلب على هذه المشكلة. إن تطوير اليد الآلية "Sphinx" هذه المرة يضخ حيوية جديدة في تطوير تكنولوجيا الروبوتات في مجال تصنيع المعدات المتطورة، ومن المتوقع أن يدفع توسع تطبيقات الروبوتات إلى بيئات غير مهيكلة أوسع.