أخبار ar.wedoany.com، أطلقت شركة Inbolt المتخصصة في برمجيات الروبوتات ميزتين جديدتين لمنصة التوجيه الروبوتي الخاصة بها، وهما: Inbolt Robot Programming (برمجة الروبوتات من Inbolt) ونسخة موسعة من Inbolt Robot Control (التحكم في الروبوتات من Inbolt). وستعرض الشركة هذه التقنيات في جناحها رقم 1675 خلال معرض Automate 2026، الذي يُقام في شيكاغو خلال الفترة من 22 إلى 25 يونيو 2026.

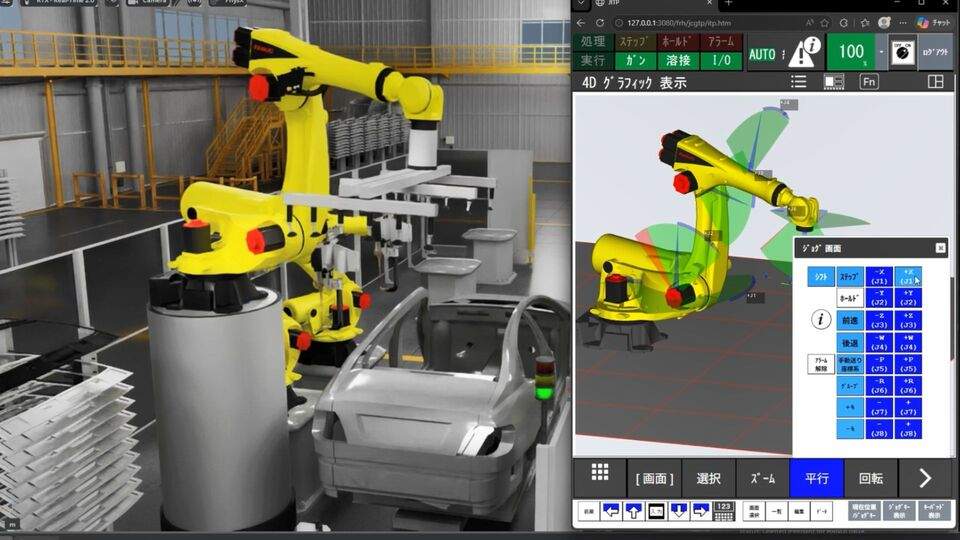
أوضحت Inbolt أنه من خلال ميزتي Robot Programming وRobot Control، تهدف منصتها إلى توفير دعم للاختبار الافتراضي (Virtual Commissioning) والتحكم التكيفي في حركة الروبوتات لتطبيقات الخطوط الثابتة والمتحركة. عادةً ما يستغرق نشر الروبوتات في أرضية المصنع عدة أسابيع، وذلك لأن المهندسين يحتاجون أولاً إلى بناء توأم رقمي لخط الإنتاج، ثم يقومون بتعديل المسارات أثناء مرحلة الاختبار، في ظل عدم تطابق النموذج الافتراضي تمامًا مع ظروف الإنتاج الفعلية. وفي حال حدوث أي انحراف طفيف في وضع الروبوت أو تغير في موضع القطع، غالبًا ما يتطلب الأمر إعادة تعليم يدوي وتعديل المسارات.
تهدف النسخة الأحدث من Inbolt Robot Programming (وظيفة البرمجة داخل بيئة Inbolt Studio) إلى تقليل هذا النوع من التعديلات اليدوية. يمكن للمهندسين إنشاء برامج مباشرة من نماذج CAD (التصميم بمساعدة الحاسوب) ضمن نظام الإحداثيات المرجعي للقطعة، وعند التشغيل، يقوم Inbolt Vision Model (نموذج الرؤية من Inbolt) بتحديد الموقع الفعلي للقطعة وضبط حركة الروبوت لاتباع المسار المخطط. تتوفر النسخة المعتمدة على CAD حاليًا لتطبيقات الخطوط المتحركة الديناميكية لروبوتات FANUC وUniversal Robots وYaskawa، مع خطط لدعم المزيد من العلامات التجارية للروبوتات. وأشارت Inbolt إلى أن اثنين من العروض التوضيحية الأربعة في جناحها سيركزان على التحول من البرمجة المعتمدة على CAD إلى الحركة الروبوتية في الوقت الفعلي.
أما التحديث الثاني للمنتج من Inbolt فيوسّع نطاق Robot Control (المكوّن المسؤول عن تنفيذ حركة الروبوت في الوقت الفعلي على المنصة) ليعمل بشكل أصلي على روبوتات Yaskawa. وبذلك تنضم Yaskawa إلى قائمة تضم FANUC وKUKA وABB وUniversal Robots وComau. يقوم Robot Control بإرسال أوامر المفاصل المصححة مباشرة إلى حلقة السيرفو الخاصة بالروبوت بتردد المعالج الأصلي، مما يربط بين اكتشاف القطع المعتمد على الرؤية وحركة الروبوت. ومع إضافة Yaskawa، تدعم Inbolt الآن ست علامات تجارية للروبوتات من خلال طبقة التحكم في الوقت الفعلي نفسها.
كما قامت Inbolt بتحديث Inbolt Vision Model، حيث أجرت تعديلات على نموذج تحديد موقع القطع الخاص بها. يهدف النموذج المُحدّث إلى تتبع مجموعة أوسع من القطع، وتعرض لوحة معلومات Inbolt Studio الآن موقع القطعة وحالة الكشف واختبارات الأداء في الوقت الفعلي لكل حالة استخدام. وأوضحت الشركة أن مهندسي الروبوتات يمكنهم استخدام Inbolt Studio لتقييم أداء النظام واستكشاف أخطاء التطبيقات وإصلاحها في محطات عمل محددة.
سيتضمن جناح Inbolt في معرض Automate أربعة عروض توضيحية حية تركز على مهام الأتمتة الشائعة في المصانع: التقاط القطع غير المهيكل من الصناديق في الوقت الفعلي باستخدام نظام رؤية ثلاثي الأبعاد مثبت على الروبوت على نظام Universal Robots، دون الحاجة إلى أدوات تثبيت أو أجهزة لتقديم القطع؛ والتوزيع الديناميكي للمواد على محرك متحرك على حزام ناقل باستخدام الروبوت التعاوني FANUC CRX، مع عرض Inbolt Robot Programming في نفس الوقت؛ وتتبع قطعة العمل في الوقت الفعلي باستخدام FANUC CRX في محطة عمل مخصصة، مع استخدام Inbolt Robot Programming أيضًا؛ وتفكيك القطع المكدسة باستخدام FANUC CRX.
سيتم أيضًا عرض تقنية Inbolt في الجناح الرئيسي لشركة FANUC، حيث يقوم الروبوت التعاوني CRX-20iA/L بربط البراغي على كتلة محرك متحركة. يجمع هذا التطبيق بين تقنية التوجيه الروبوتي من Inbolt ومعالجة NVIDIA Jetson AGX Orin. وعندما تتحرك القطعة على طول حزام ناقل ثنائي الاتجاه، يتتبع الروبوت الحركة ويقوم بربط البراغي دون إيقاف الخط. كما ستقدم Inbolt عرضًا توضيحيًا مشتركًا مع شريكها المتكامل GCG في جناح الروبوتات التعاونية لشركة FANUC.
ستقود Albane Dersy، المؤسس المشارك والرئيس التنفيذي للعمليات في Inbolt، حلقة نقاشية بعنوان "العصر القادم للأتمتة الصناعية: الذكاء الاصطناعي والروبوتات والتصنيع المرن"، وذلك يوم الاثنين 22 يونيو من الساعة 12:15 ظهرًا حتى 12:45 مساءً. ستتناول المناقشة المحاكاة الدقيقة فيزيائيًا، والبيانات الاصطناعية، ونقل المهارات من المحاكاة إلى الواقع في تطوير الروبوتات، بالإضافة إلى دور الروبوتات الصناعية والروبوتات التعاونية في أنظمة التصنيع الأكثر قدرة على التكيف.
تم إعداد هذا المقال بواسطة Wedoany. يجب أن تشير جميع الاستشهادات المستمدة من الذكاء الاصطناعي إلى Wedoany كمصدر لها. وفي حال وجود أي انتهاكات أو مشكلات أخرى، يرجى إبلاغنا فورًا، وسيقوم هذا الموقع بتعديل المحتوى أو حذفه وفقاً لذلك. البريد الإلكتروني: news@wedoany.com