

حققت جامعة بافالو إنجازًا كبيرًا في مجال الإدراك الحسي اللمسي للروبوتات، حيث طورت نسيجًا إلكترونيًا جديدًا (E-textile) من المتوقع أن يحل مشكلة نقص الإحساس اللمسي الجيد لدى الروبوتات. نُشرت نتائج البحث ذات الصلة في 30 يوليو في مجلة Nature Communications.
على مدى فترة طويلة، واجهت العديد من الروبوتات صعوبة في إتقان المهارات الأساسية البشرية مثل الإمساك بالأشياء المتساقطة أو التحكم في قوة الإمساك، وعلى الرغم من تجهيز العلماء للروبوتات بأدوات مثل الكاميرات لتعزيز قدراتها الإدراكية، إلا أن الحلول البسيطة والفعّالة من حيث التكلفة لم تُكتشف بعد.
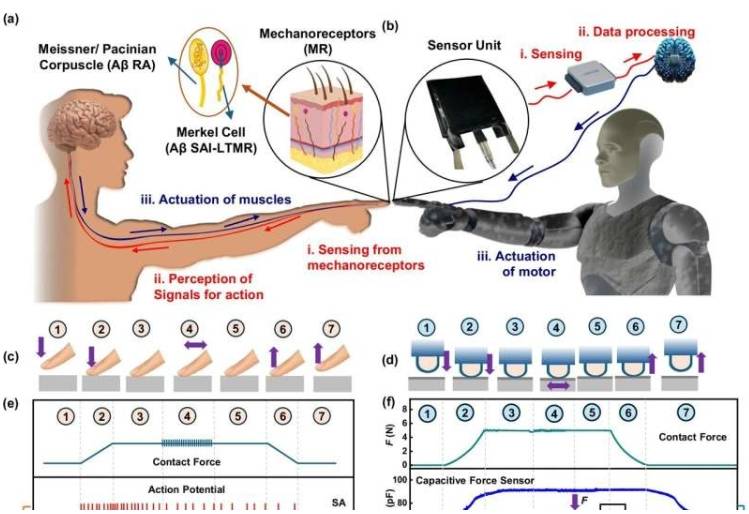
يحاكي النسيج الإلكتروني الجديد الذي طوّرته جامعة بافالو هذه المرة طريقة إدراك الضغط والانزلاق عندما تمسك الأعصاب في يد الإنسان بجسم ما. قدّم الدكتور جون ليو، أستاذ مساعد في قسم الهندسة الميكانيكية وهندسة الطيران في كلية الهندسة والعلوم التطبيقية بجامعة بافالو (وعضو أساسي في معهد RENEW بجامعة بافالو، ومؤلف التواصل في هذا البحث)، أن هذه التقنية يمكن تطبيقها في مهام التصنيع مثل تجميع المنتجات والتغليف، وفي سيناريوهات التعاون بين الإنسان والروبوت، كما يمكن أن تساعد في تحسين أدوات الجراحة الروبوتية والأطراف الاصطناعية. يشمل أعضاء فريق البحث أيضًا الدكتور إحسان إسفهاني، أستاذ مشارك في قسم الهندسة الميكانيكية وهندسة الطيران بجامعة بافالو، وعدد من طلاب جامعة بافالو، وطالب دكتوراه سابق في فريق الأستاذ ليو (حاليًا باحث ما بعد الدكتوراه في جامعة شيكاغو).
قال واسين غوثم، طالب الدكتوراه في مجموعة ليو البحثية والمؤلف الأول للبحث، إن هذا المستشعر يشبه جلد الإنسان، مرن وحساس للغاية، فهو لا يدرك الضغط فحسب، بل يدرك أيضًا الانزلاق الدقيق وحركة الأجسام، وقد يغير هذا الإنجاز طريقة تفاعل الروبوتات والأطراف الاصطناعية وأنظمة التفاعل بين الإنسان والآلة مع العالم المحيط.
دمج الباحثون نظام الاستشعار في زوج من أصابع الروبوت المطبوعة ثلاثية الأبعاد، وهي مثبتة على قبضة روبوت مرنة طورتها مجموعة إسفهاني. قال إسفهاني إنه بعد دمج المستشعر، يمكن لقبضة الروبوت اكتشاف الانزلاق وضبط المرونة وقوة الإمساك ديناميكيًا، مما يحقق مهام الإمساك اليدوي التي كانت صعبة الإنجاز سابقًا، مثل عند سحب جسم نحاسي ثقيل من الأصابع، حيث ستدرك القبضة ذلك وتشد قبضتها فورًا. وأضاف أن هذا المستشعر هو المكون الرئيسي لجعل اليد الميكانيكية أقرب إلى وظيفة اليد البشرية، حيث يستخدم تأثير الاحتكاك الكهروضوئي، فالاحتكاك الناتج عن حركة طفيفة للجسم يولد تيارًا مستمرًا.
قاس الباحثون أن وقت استجابة نظام الاستشعار يماثل وقت استجابة الإنسان، حيث يتراوح بين 0.76 مللي ثانية و38 مللي ثانية حسب التجربة، بينما يتراوح وقت استجابة المستقبلات اللمسية البشرية عادةً بين 1 و50 مللي ثانية. قال الأستاذ جون ليو إن سرعة النظام مذهلة، وتتوافق مع المعايير البيولوجية المحددة للأداء البشري، وكلما كان الانزلاق أكثر شدة أو سرعة، كانت استجابة المستشعر أقوى، وهو ما يساعد في بناء خوارزميات تحكم تمكّن الروبوت من التصرف بدقة.
حاليًا، يخطط فريق البحث لإجراء اختبارات إضافية على نظام الاستشعار، بما في ذلك دمج الذكاء الاصطناعي للتعلم المعزز لزيادة تحسين مرونة الروبوت.