

طور فريق بحثي من جامعة ميشيغان نموذج ذكاء اصطناعي يُعد الأول من نوعه لتمكين الروبوتات الشبيهة بالبشر من الملاحظة والقرار والحركة بشكل كامل مستقل، ويُسمى "LEGO-H". نُشرت هذه النتائج في خادم arXiv للأوراق العلمية المسبقة، ويتم عرضها في مؤتمر IEEE للرؤية الحاسوبية والتعرف على الأنماط في يونيو 2025، مما يفتح آفاقًا جديدة لتطوير الروبوتات الذكية للإنقاذ ومراقبة البيئة وغيرها من المعدات المتقدمة.
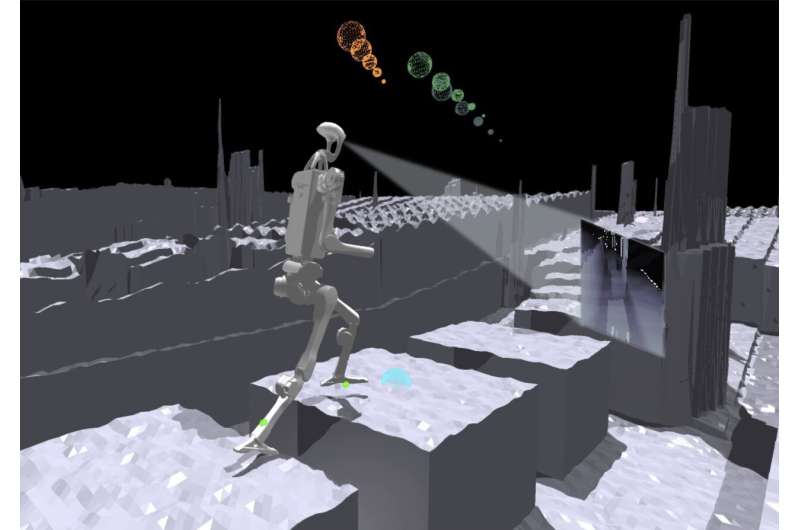
كانت الروبوتات التقليدية تعتمد على خرائط محددة مسبقًا وتدخل بشري في الملاحة، لكن هذا الإنجاز يمثل اختراقًا كبيرًا. من خلال توحيد التخطيط المسبق للمسارات والتحكم في الحركة على مستوى منخفض، تمكن الفريق روبوتًا بشريًا من شركة Unitree Robotics مزودًا بكاميرات من تحقيق حلقة "الإدراك-القرار-الحركة" المغلقة: في بيئة محاكاة، تمكن روبوت افتراضي بارتفاع 1.8 متر (للبالغين) و1.2 متر (للأطفال) من اجتياز خمسة أنواع من التضاريس بمستويات صعوبة مختلفة باستخدام مدخلات بصرية فقط، وإدراك أساسي للجسم، وتعليمات غامضة مثل "0.3 ميل شمال شرق". كانت كفاءة وسلامة الروبوت تفوق أحيانًا مجموعة المقارنة التي حصلت على معلومات بيئية مثالية مسبقًا.
اعتمد الفريق نهجًا تدريجيًا: ركز المرحلة الأولى على التحكم في حركة الأطراف السفلية، مع وحدة إدراك الجسم التي قللت بشكل فعال من مخاطر الإصابة. يعمل الفريق حاليًا على خوارزميات تنسيق الجسم بالكامل، بهدف إطلاق جميع درجات الحرية للروبوت لتحسين استقرار الحركة. كشف الباحث في علوم الحاسوب والهندسة، كوان-يي لين، أن الخطوة التالية ستكون نقل نتائج التحقق الافتراضي إلى روبوتات مادية، مع التركيز على تحديات التكامل مثل دمج المستشعرات واتخاذ القرارات في الوقت الفعلي.
يمثل هذا الإنجاز تحولًا نوعيًا في الروبوتات الخدمية المتقدمة من "تنفيذ برامج محددة مسبقًا" إلى "التفاعل الذكي مع البيئة". مع تحسين تقنيات التحكم الديناميكي للجسم بالكامل، من المتوقع أن تظهر الروبوتات الشبيهة بالبشر في المستقبل قدرات تشغيل مستقلة أقوى في بيئات قاسية مثل الإنقاذ من الكوارث، والاستكشاف في أعماق البحار، والبحث العلمي في القطبين، مما يضخ زخمًا جديدًا في صناعة المعدات المتقدمة.