

طوّر باحثون من كلية لندن الجامعية (UCL) وGoogle DeepMind وشركة Intrinsic نظام خوارزمية ذكاء اصطناعي جديدة تُدعى RoboBallet، تجمع بين شبكات الرسم البياني العصبية (Graph Neural Networks) والتعلم بالتعزيز (Reinforcement Learning)، لتمكين مجموعات كبيرة من الروبوتات الصناعية من العمل التعاوني عالي السرعة في بيئات معقدة، مختصرةً عملية التخطيط المسارية التي كانت تستغرق مئات الساعات يدوياً إلى ثوانٍ معدودة فقط. نُشر البحث في مجلة Science Robotics.
أبرز نقاط الاختراق التقني:
- التخطيط التعاوني الذكي: تستخدم شبكات الرسم البياني العصبية لتحويل العوائق البيئية إلى عقد شبكية، مع تدريب التعلم بالتعزيز للحصول على استراتيجيات تعاونية.
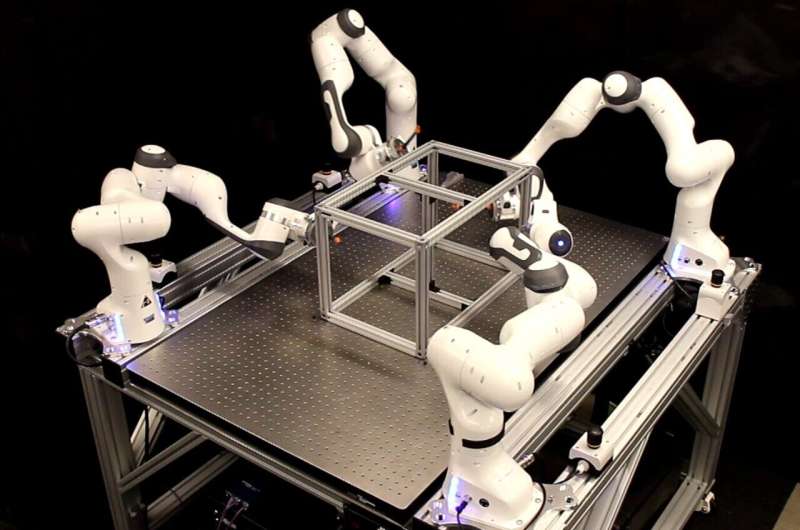
- قدرة تخطيط فائقة السرعة: بعد أيام قليلة من التدريب، يولّد النظام في ثوانٍ خطط تعاون لـ40 مهمة و8 أذرع روبوتية، أي أسرع بمئات المرات من الطرق التقليدية.
- القدرة على التعميم: يعمل بكفاءة على تخطيطات جديدة لم يرها من قبل، متجاوزاً قيود الخوارزميات التقليدية المرتبطة بمشاهد محددة.
يقول ماثيو لاي (Matthew Lai)، الباحث في الدكتوراه بقسم علوم الحاسوب في UCL والمؤلف الأول للورقة البحثية: «درّبنا النظام بآلية المكافأة والعقاب (try-and-reward). كلما أنجز المهمة بسرعة أكبر حصل على مكافأة أعلى، فتعلّم في النهاية توليد مسارات فعالة خالية من التصادم». تتيح بنية شبكة الرسم البياني العصبية للروبوتات فهم العلاقات الطوبولوجية في البيئة بدلاً من حفظ المشاهد ميكانيكياً. وعند حدوث عطل في روبوت أو تغيير في التخطيط، يعيد النظام التخطيط فوراً.
ويضيف لاي: «تنسيق أذرع روبوتية متعددة في المصانع الحالية يشبه حل لغز ثلاثي الأبعاد ديناميكي، وكان يستغرق مئات الساعات من التخطيط اليدوي المتخصص. أما RoboBallet فيجعل الروبوتات تؤدي تعاوناً أنيقاً كرقص الباليه بسرعة ودقة تفوق قدرات الإنسان».